
GTJZ1012 Scissor ເວທີການດໍາເນີນງານທາງອາກາດ





I. ພາບລວມຂອງຜະລິດຕະພັນ ແລະຄຸນສົມບັດ
ແພລະຕະຟອມການເຮັດວຽກທາງອາກາດໃຫມ່ທີ່ພັດທະນາໂດຍ XCMG ມີຄວາມສູງຂອງການເຮັດວຽກຢູ່ທີ່ 12m, ຄວາມກວ້າງຂອງຍານພາຫະນະຢູ່ທີ່ 1.17m, ລະດັບການໂຫຼດຢູ່ທີ່ 320kg, ສູງສຸດທີ່ເຄຍ.ຄວາມຍາວເວທີຢູ່ທີ່ 3.2m ແລະສູງສຸດ.gradeability ຢູ່ທີ່ 25%.ຍານພາຫະນະນີ້ມີໂຄງສ້າງທີ່ຫນາແຫນ້ນ, ປະສິດທິພາບກ້າວຫນ້າ, ອຸປະກອນຄວາມປອດໄພທີ່ສໍາເລັດສົມບູນ, ໂດຍສະເພາະແມ່ນເຫມາະສົມສໍາລັບການກໍ່ສ້າງ.ເພີ່ມເຕີມ.ມັນບໍ່ມີມົນລະພິດໃດໆ, ມີການຍົກ / ຫຼຸດລົງຢ່າງຕໍ່ເນື່ອງ, ການຄວບຄຸມແລະການບໍາລຸງຮັກສາງ່າຍ.ດັ່ງນັ້ນ, ເວທີປະເພດນີ້ຈຶ່ງຖືກນຳໃຊ້ຢ່າງກວ້າງຂວາງກັບສາງ, ໂຮງງານ, ສະໜາມບິນ, ສະຖານີລົດໄຟ, ໂດຍສະເພາະສະຖານທີ່ເຮັດວຽກແຄບ.
[ຂໍ້ດີແລະຄຸນສົມບັດ]
● ລະບົບຂັບເຄື່ອນດ້ວຍໄຟຟ້າທີ່ມີປະສິດທິພາບ ແລະປະຫຍັດພະລັງງານ ມີລັກສະນະບໍ່ມີການປ່ອຍອາຍພິດ ແລະສິ່ງລົບກວນຕໍ່າ, ພ້ອມກັບຢາງລົດທີ່ບໍ່ມີຮອຍຂີດຂ່ວນ, ເຮັດໃຫ້ເຄື່ອງນີ້ສາມາດເຮັດວຽກໄດ້ຢ່າງງ່າຍດາຍໃນສະພາບແວດລ້ອມອ້ອມຮອບ ເຊັ່ນ: ອາຄານຫ້ອງການ, ໂຮງໝໍ ແລະໂຮງຮຽນ ແລະຫຼຸດຜ່ອນຜົນກະທົບຕໍ່ສິ່ງແວດລ້ອມ.
●ກົນໄກປ້ອງກັນທີ່ຫ້າວຫັນເຊັ່ນ: ກົນໄກປ້ອງກັນຮູຂຸມຂົນ ແລະລະບົບການຄວບຄຸມຄວາມປອດໄພທີ່ພັດທະນາດ້ວຍຕົນເອງ ມີລັກສະນະການອອກແບບຂອງມະນຸດ ແລະທາງເລືອກທີ່ອຸດົມສົມບູນ, ຕອບສະຫນອງຄວາມຕ້ອງການຂອງລູກຄ້າສໍາລັບຄວາມປອດໄພ, ຄວາມຫນ້າເຊື່ອຖື ແລະສະຕິປັນຍາ.
●ເວທີການເຮັດວຽກສາມາດຂະຫຍາຍອອກ, ຂະຫຍາຍພື້ນທີ່ເຮັດວຽກ, ພ້ອມກັບຮົ້ວທີ່ສາມາດພັບໄດ້ເຮັດໃຫ້ການຂົນສົ່ງງ່າຍຂຶ້ນ.
●“ Zero Turning Radius ” ເປັນເອກະລັກ ແລະ ເຮັດໃຫ້ເຄື່ອງສາມາດເຂົ້າມຸມໃນຫ້ອງແຄບໄດ້.
●ສູງສຸດ.payload ຢູ່ 320kg, ນໍາພາອຸດສາຫະກໍາ.
● ຄວາມໄວໃນການເດີນທາງສູງສຸດ 3.2 ກິໂລແມັດຕໍ່ຊົ່ວໂມງ ແລະ 25% ຄວາມສາມາດໃນການຂັບໄລ່ໄດ້ງ່າຍຂຶ້ນ.
I. ພາບລວມຂອງຜະລິດຕະພັນ ແລະຄຸນສົມບັດ
XCMG scissors ເວທີການເຮັດວຽກທາງອາກາດ GTJZ1012 ມີຂໍ້ໄດ້ປຽບຫຼາຍດັ່ງຕໍ່ໄປນີ້:
1. ການຂົນສົ່ງສະດວກ ແລະ ການດໍາເນີນງານທີ່ໝັ້ນຄົງ
ແພລະຕະຟອມຍ່ອຍຂອງ telescoping ບັນລຸພື້ນທີ່ເຮັດວຽກຂະຫນາດໃຫຍ່ແລະເຮັດວຽກກັບເວທີພັບເພື່ອຮັບຮູ້ການຂົນສົ່ງແລະການເຄື່ອນຍ້າຍທີ່ງ່າຍຂຶ້ນ.ລະບົບປ້ອງກັນຂຸມອັດຕະໂນມັດຊັ້ນນໍາຂອງອຸດສາຫະກໍາແລະການອອກແບບ tread wheel ເປີດກວ້າງເຮັດໃຫ້ການດໍາເນີນງານຂອງທ່ານຟຣີເຖິງແມ່ນວ່າຢູ່ໃນພື້ນທີ່ rough.
2. ການຮັກສາສິ່ງແວດລ້ອມ ແລະ ການບໍລິການສະດວກ
ຂັບໄຟຟ້າບໍລິສຸດ, ການປ່ອຍສູນ, ສຽງຕ່ໍາແລະການກໍ່ສ້າງສິ່ງແວດລ້ອມຫຼາຍ.ຖາດປະເພດ swing ໂດຍລວມແມ່ນສະດວກສໍາລັບການບໍລິການແລະການບໍາລຸງຮັກສາ.
3. ການອອກແບບທົ່ວໄປ ແລະໂມດູນ
ການອອກແບບ modular ສໍາລັບເຄື່ອງຈັກຮັບປະກັນຄວາມເປັນວິທະຍາໄລຂອງພາກສ່ວນ, ເຮັດໃຫ້ການສ້ອມແປງແລະການບໍາລຸງຮັກສາຂອງລູກຄ້າງ່າຍຂຶ້ນ, ແລະບັນລຸຄ່າໃຊ້ຈ່າຍໃນການແຂ່ງຂັນຫຼາຍ.
II.ການແນະນໍາຂອງພາກສ່ວນຕົ້ນຕໍ
1. Chassis
ການຕັ້ງຄ່າຕົ້ນຕໍ: ການຊີ້ນໍາສອງລໍ້, ຂັບ 4×2, ລະບົບຫ້າມລໍ້ອັດຕະໂນມັດ, ລະບົບການປ້ອງກັນ pothole ອັດຕະໂນມັດ, ຢາງແຂງທີ່ບໍ່ມີເຄື່ອງຫມາຍ, ການປ່ອຍເບກຄູ່ມື
(1) ຄວາມໄວສູງສຸດຂອງການຂັບລົດແມ່ນ 3.2 km / h.
(2) gradient ສູງສຸດແມ່ນ 25%.
(3) ຂຸມມາດຕະຖານຢູ່ດ້ານຫລັງຂອງຕົວເຄື່ອງສໍາລັບການຂົນສົ່ງສ້ອມ
(3) ລະບົບປ້ອງກັນຂຸມອັດຕະໂນມັດ - ຮັບປະກັນຄວາມປອດໄພຂອງການຍົກເວທີ.
(4) ຢາງຢາງແຂງ Trackless - payload ສູງ, ການດໍາເນີນງານທີ່ຫມັ້ນຄົງແລະເປັນມິດກັບສິ່ງແວດລ້ອມ
(5) ຂັບ 4×2, ລໍ້ຫັນເປັນລໍ້ຂັບ, ສາມຄວາມໄວຂັບ, ອະນຸຍາດໃຫ້ການເດີນທາງຢ່າງເຕັມທີ່.
(6) ລະບົບເບກອັດຕະໂນມັດ - ເຄື່ອງຈັກເບກອັດຕະໂນມັດເມື່ອມັນຢຸດການເດີນທາງຫຼືຢຸດຢູ່ເທິງຄ້ອຍ;ນອກຈາກນັ້ນ, ຍັງມີເບຣກມືພິເສດສຳລັບສຸກເສີນ.
2. ບູມ
(1) ກະບອກ Luffing ຄູ່ + ຫ້າຊຸດຂອງ shear boom.
(2) ເຫຼັກກ້າທີ່ມີຄວາມເຂັ້ມແຂງສູງ - ຂະຫຍາຍຕົວຢ່າງມີນ້ໍາຫນັກເບົາແລະປອດໄພກວ່າ.
(3) ການຈັບຄູ່ຄວາມເຂັ້ມແຂງແລະຄວາມແຂງ - ຮັບປະກັນການຂະຫຍາຍຕົວທີ່ເຊື່ອຖືໄດ້.
(4) ກອບການກວດກາ - ຮັກສາຄວາມປອດໄພຂອງການກວດກາ
3. ເວທີການເຮັດວຽກ
(1) Payload ເຖິງ 320kg ສໍາລັບເວທີຕົ້ນຕໍແລະ 115kg ສໍາລັບເວທີຮອງ;
(2) ຄວາມຍາວຂອງເວທີ×ກວ້າງ: 2.27 m × 1.12m;
(3) ເວທີຍ່ອຍສາມາດຍືດຍາວໄດ້ທາງດຽວ 0.9 ແມັດ;
(4) ປະຕູເວທີລັອກດ້ວຍຕົນເອງ
(5) ກອງເວທີສາມາດພັບໄດ້
4. ລະບົບໄຮໂດຼລິກ
(1) ອົງປະກອບໄຮໂດຼລິກ - ປັ໊ມໄຮໂດຼລິກ, ປ່ຽງຕົ້ນຕໍ, ມໍເຕີໄຮໂດຼລິກແລະເບກແມ່ນມາຈາກຜູ້ຜະລິດທີ່ມີຊື່ສຽງໃນປະເທດ (ຫຼືສາກົນ)
(2) ລະບົບໄຮໂດຼລິກແມ່ນຂັບເຄື່ອນດ້ວຍປັ໊ມເກຍທີ່ຂັບເຄື່ອນດ້ວຍມໍເຕີ, ເພື່ອຍົກສູງຫຼືຫຼຸດລົງເວທີແລະແລ່ນແລະຊີ້ນໍາເວທີ.
(3) ກະບອກສູບ hoisting ມີການຕິດຕັ້ງປ່ຽງຫຼຸດລົງສຸກເສີນ - ໃຫ້ແນ່ໃຈວ່າເວທີສາມາດຫຼຸດລົງກັບ retraction ດ້ວຍຄວາມໄວທີ່ຫມັ້ນຄົງເຖິງແມ່ນວ່າຢູ່ໃນອຸປະຕິເຫດຫຼືໄຟຟ້າຕັດ.
(4) ກະບອກຍົກແມ່ນອຸປະກອນທີ່ມີ lock ບົບໄຮໂດຼລິກເພື່ອຮັບປະກັນການຮັກສາຄວາມສູງທີ່ເຊື່ອຖືໄດ້ຂອງເວທີການເຮັດວຽກຫຼັງຈາກທໍ່ໄຮໂດຼລິກແຕກ.
5. ລະບົບໄຟຟ້າ
(1) ລະບົບໄຟຟ້າໃຊ້ເຕັກໂນໂລຊີການຄວບຄຸມລົດເມ CAN.chassis ໄດ້ຖືກຕິດຕັ້ງດ້ວຍຕົວຄວບຄຸມ, ເວທີແມ່ນເຫມາະກັບຕົວຄວບຄຸມແລະການສື່ສານລະຫວ່າງ chassis ແລະຕົວຄວບຄຸມເວທີແມ່ນຮັບຮູ້ໂດຍຜ່ານ CAN bus ເພື່ອຄວບຄຸມການດໍາເນີນການຂອງເຄື່ອງຈັກ.
(2) ເທກໂນໂລຍີການຄວບຄຸມອັດຕາສ່ວນເຮັດໃຫ້ການປະຕິບັດແຕ່ລະຢ່າງຄົງທີ່.
(3) ລະບົບໄຟຟ້າຄວບຄຸມການປະຕິບັດທັງຫມົດ, ລວມທັງການຊີ້ນໍາຊ້າຍ / ຂວາ, ການເດີນທາງໄປຂ້າງຫນ້າ / ກັບຄືນໄປບ່ອນ, ການປ່ຽນແປງລະຫວ່າງຄວາມໄວສູງແລະຕ່ໍາແລະການຍົກ / ຫຼຸດຂອງເວທີເຮັດວຽກ.
(4) ຄວາມປອດໄພແລະວິທີການເຕືອນຫຼາຍ: tilting ປ້ອງກັນ;inter-locking ຂອງ handles;ການປ້ອງກັນຂຸມອັດຕະໂນມັດ;ການປ້ອງກັນຄວາມໄວຕ່ໍາອັດຕະໂນມັດໃນລະດັບຄວາມສູງ;ຫຼຸດລົງຢຸດຊົ່ວຄາວສາມວິນາທີ;ລະບົບເຕືອນໄພການໂຫຼດຫນັກ (ທາງເລືອກ);ລະບົບປ້ອງກັນການສາກໄຟ;ປຸ່ມສຸກເສີນ;buzzer ການປະຕິບັດ, flasher ຄວາມຖີ່, horn, timer ແລະລະບົບການວິນິດໄສຄວາມຜິດ.
III.ການຕັ້ງຄ່າອົງປະກອບຕົ້ນຕໍ
| S/N | ອົງປະກອບຫຼັກ | ປະລິມານ | ຍີ່ຫໍ້ | ຫມາຍເຫດ |
| 1 | ຜູ້ຄວບຄຸມ | 1 | Hirschmann/North Valley | |
| 2 | ປ້ຳຫຼັກ | 1 | Sant/Bucher | |
| 3 | ມໍເຕີໄຮໂດລິກ | 2 | Danfoss | |
| 4 | ເບກໄຮໂດລິກ | 2 | Danfoss | |
| 5 | ຫົວໜ່ວຍພະລັງງານ | 1 | Bucher/GERI | |
| 6 | Derricking cylinder | 1 | XCMG Hydraulic department / Dacheng / Shengbang / Diaojiang | |
| 7 | ກະບອກຊີ້ນໍາ | 1 | ||
| 8 | ແບັດເຕີຣີ | 4 | Trojan/Leoch | |
| 9 | ເຄື່ອງສາກ | 1 | GPD | |
| 10 | ຈຳກັດປຸ່ມ | 2 | Honeywell/CNTD | |
| 11 | ການທົດສອບສະຫຼັບ | 2 | Honeywell/CNTD | |
| 12 | ມໍເຕີຂັບ | 1 | Curtis | |
| 13 | ຢາງລົດ | 4 | Exmile/ກຳລັງ | |
| 14 | ເຊັນເຊີມຸມ | 1 | Honeywell | ທາງເລືອກ |
| 15 | ເຊັນເຊີຄວາມກົດດັນ | 1 | danfoss | ທາງເລືອກ |
IV.ຕາຕະລາງຂອງຕົວກໍານົດການດ້ານວິຊາການຕົ້ນຕໍ
| ລາຍການ | ໜ່ວຍ | ພາລາມິເຕີ | ຄວາມທົນທານທີ່ອະນຸຍາດ | |
| ຂະໜາດເຄື່ອງ | ຄວາມຍາວ (ບໍ່ມີຂັ້ນໄດ) | mm | 2485 (2285) | ±0.5 % |
| ກວ້າງ | mm | 1170 | ||
| ຄວາມສູງ(ພັບເວທີ) | mm | 2472 (1908) | ||
| ຖານລໍ້ | mm | 1876 | ±0.5 % | |
| ຕິດຕາມລໍ້ | mm | 1043 | ±0.5 % | |
| ການເກັບກູ້ພື້ນທີ່ຕໍາ່ສຸດ (ຕົວປ້ອງກັນຂຸມຂຶ້ນ / ລົງ) | mm | 100/20 | ±5 % | |
| ຂະຫນາດຂອງເວທີການເຮັດວຽກ | ຄວາມຍາວ | mm | 2276 | ±0.5 % |
| ກວ້າງ | mm | 1120 | ||
| ຄວາມສູງ | mm | 1254 | ||
| ຄວາມຍາວສ່ວນຂະຫຍາຍຂອງເວທີເສີມ | mm | 900 | ||
| ຕໍາແຫນ່ງສູນກາງຂອງເຄື່ອງຈັກ | ໄລຍະຫ່າງອອກຕາມລວງນອນກັບ shaft ຫນ້າ | mm | 950 | ±0.5 % |
| ຄວາມສູງຂອງສູນກາງ | mm | 663 | ||
| ມະຫາຊົນຂອງເຄື່ອງຈັກ | kg | 2940 | ±3 % | |
| ສູງສຸດ.ຄວາມສູງຂອງເວທີ | m | 10 | ±1% | |
| ຕ່ຳສຸດຄວາມສູງຂອງເວທີ | m | 1.34 | ±1% | |
| ຄວາມສູງການເຮັດວຽກສູງສຸດ | m | 12 | ±1% | |
| ລັດສະໝີຂອງການຫັນຕ່ຳສຸດ (ລໍ້ພາຍໃນ/ລໍ້ນອກ) | m | 0/2.3 | ±1% | |
| ລະດັບການໂຫຼດຂອງເວທີການເຮັດວຽກ | kg | 320 | — | |
| Payload ຫຼັງຈາກເວທີການເຮັດວຽກຂະຫຍາຍ | kg | 115 | — | |
| ຍົກເວລາຂອງເວທີການເຮັດວຽກ | s | 50-75 | — | |
| ຫຼຸດລົງເວລາຂອງເວທີການເຮັດວຽກ | s | 43-65 | — | |
| ສູງສຸດ.ແລ່ນຄວາມໄວຢູ່ໃນຕໍາແຫນ່ງຕ່ໍາ. | ກມ/ຊມ | ≥3.2 | — | |
| ສູງສຸດ.ຄວາມໄວໃນການເດີນທາງໃນລະດັບສູງ | ກມ/ຊມ | ≥0.8 | — | |
| ລະດັບຄວາມອາດສາມາດສູງສຸດ | % | 25 | — | |
| ມຸມເຕືອນໄພອຽງ (ຂ້າງ / ໄປຫນ້າແລະກັບຄືນໄປບ່ອນ) | ° | 1.5/3 | ||
| ຍົກ / ແລ່ນມໍເຕີ | ຕົວແບບ | — | — | — |
| ລະດັບພະລັງງານ | kW | 3.3 | — | |
| ຜູ້ຜະລິດ | — | — | — | |
| ແບັດເຕີຣີ | ຕົວແບບ | — | T125/3-EV-225 | — |
| ແຮງດັນ | v | 24 | — | |
| ຄວາມອາດສາມາດ | Ah | 240 | — | |
| ຜູ້ຜະລິດ | — | Trojan/Leoch | — | |
| ແບບຢາງ | — | Traceless ແລະແຂງ /381×127 | — | |
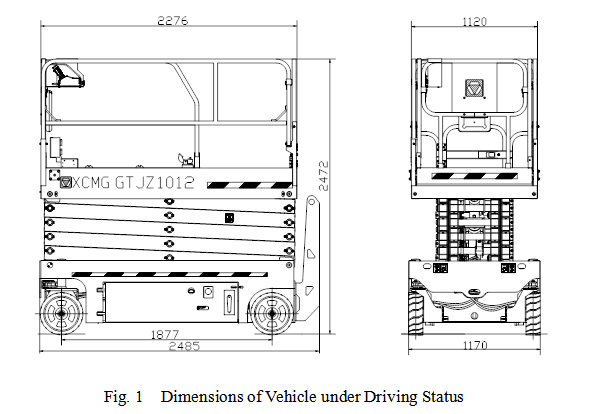
V. ແຜນວາດມິຕິຂອງຍານພາຫະນະໃນລັດແລ່ນ
ໄຟລ໌ແນບ: ການຕັ້ງຄ່າທາງເລືອກ
(1) ລະບົບເຕືອນໄພການໂຫຼດ
(2) ໂຄມໄຟເຮັດວຽກຂອງເວທີ
(3) ເຊື່ອມຕໍ່ກັບທໍ່ອາກາດຂອງເວທີການເຮັດວຽກ
(4) ເຊື່ອມຕໍ່ກັບການສະຫນອງພະລັງງານ AC ຂອງເວທີການເຮັດວຽກ



